

Son zamanlarda oldukça sık bir şekilde her yerde karşımıza çıkan dans eden robotlara denk gelmişsinizdir. Geçtiğimiz günlerde Hyundai’nin satın aldığı robotik sistem çalışmaları ile ünlü Boston Dynamics resmi hesabından paylaştığı videoyla bilim ve teknoloji dünyasının yanı sıra tüm insanlığı şok etti. Çünkü bu robotlar en hassas dans hareketlerini yapabiliyor, en zor ayak figürlerini kullanabiliyor ve bu da yetmezmiş gibi birbirleriyle senkronize olabiliyorlar. Çoğu insan görüntüleri ilk izlediğinde CGI sisteminin (bu sistemi açıklayacağım) kullanıldığını düşünse de Boston Dynamics bunun aksini ispat etti. Hatta geçen yaz (sonuçta bir yatırım şirketi oldukları için) ilk kez bir robotunu yazılım geliştirme kitiyle beraber satışa sundular.
Boston Dynamics Robotları

Öyleki birazcık python bilgisine sahipseniz robotun nasıl davranacağını kendiniz ayarlayabilir, ona zaten yüklenmiş olan dans yazılımını daha da geliştirebilir ve üzerinde oynamalar yapabilirsiniz. Anlayacağınız bu robotlar gerçekten bu kıvrak hareketleri yapabiliyorlar. Peki nasıl? Robot mekaniği açısından bu nasıl mümkün olabiliyor? Robotlar hassas hareketlerde de bu kadar yüksek kabiliyete nasıl sahip olabiliyor? Bu sorularım üzerine Boston Dynamics, CGI sistemi ve robotik sistemlere entegresi, kabaca robot mekaniği ve dans eden bu robotların mekaniği hakkında çeşitli araştırmalar yaptım ve robotiğin içinde olan bir mühendislik öğrencisi olarak sürecin baştan sona kadar takibinde bulundum. Umarım beğenirsiniz.
Makine mühendisliği öğrenciliği yıllarımda, bulunduğum robotik kulüplerde ve stajlarımda edindiğim deneyimlere göre kolay anlaşılması adına oldukça basitleştirerek robot mekaniği hakkında genel bir çerçeve çizelim öncelikle. Bir robotun mekaniğini oluşturabilmek için öncelikle görev tanımlamasını yapmalıyız. Şöyleki robotlar belli bir görevi gerçekleştirmek için oluşturulan makinalardır. Bu yüzden sistemini düzgün çalışır bir şekilde hesaplamak ve oluşturabilmek için görevini seçmemiz gerekir. Görev belirlemesini yaptıktan sonra görevine ve alanına uygun malzeme ve parça seçimleri araştırılır. Bu aşama oldukça önemlidir ve çok uzun sürer. Çünkü bir makinada kullanılan malzeme seçimi makinanın kalitesi ve ömrünü belirler. Gerekli malzeme ve parça seçimlerinden sonra robot mekaniği belirlenir ve bu mekaniğe göre gerekli sistem oluşturularak robotun uzuvları belirlenmiş olur. Kısaca robot mekaniğini teorisinden bahsedeyim. Robot mekaniğini dinamik ve kinematik olmak üzere genel 2 sınıfa ayırıyoruz. Robot kinematiği 3 önemli ana unsur etrafında toplanır:
- İleri Kinematik (Robotun uç işlevcisinin konumu açısından çok önemlidir)
- Ters Kinematik (Gerekli eklem değişkenleri açısından çok önemlidir)
- Yörünge hesaplaması (Şuana kadar robotun konum ve yönelimi hesaplandı. Robotun düzgün çalışması ve istenilen pozisyonda gitmesi, robotun hız ve ivmesine bağlıdır. Bu bilgilerle yörünge hesaplaması da yapılır. Bu aşamada çokça yöntem kullanılır ve çok uzun bir aşamadır. O yüzden çok detay ve hesaplama vermeden geçeceğim.)
Robot kinematiği belirlendikten sonra dinamiğe geçilir. Kinematik hesabı çok uzun ve zorlu bir süreç olduğu için dinamik aşamasına geçilince işler hafifleyecek gibi hissettirse de aslında bu aşama da oldukça zorludur. Mikrodenetleyiciler, atalet sensörleri, kütle matrisler vs birçok detay ve uzun hesaplama barındırır içinde. Bu konuyla alakalı detaylı ve oldukça açıklayıcı bir yazı oluşturacağım.)
Tüm bu işlemler bittiğinde elimizde belirlenmiş işlevi yapan ve kontrolü elimizde olan bir robot elde etmiş oluruz. Kabaca basit bir robot mekaniğini anlatmaya çalıştım az önce. Basit bir robot yapmak bile belki de aylar ve yıllar süren süreçler gerektirirken Boston Dynamics’in dansçı robotlarının yapım aşamasının ne kadar zor olduğunu tahmin etmişsinizdir herhalde. Çünkü belirlediğimiz görev ne kadar zor ve ne kadar hassas olursa hesaplamamız gereken mekanik sistem de o kadar karışık ve zorlu bir hal alır. Şimdi tüm bunlara dayanarak o etkileyici hassaslıkta senkronize dansı yapan robotların mekanik hesaplanmasının da zorluğunu düşünürsek, bilim ve teknoloji dünyasının şaşkınlığına ve CGI zannetmesine şaşırmamak gerek. Sırası gelmişken CGI nedir ondan da bahsedeyim.
CGI Nedir? (Computer Generated Imaginary)
Bilgisayar üretimli imgeleme adıyla da karşımıza çıkıyor bu terim. Görüntü oluşturmak için kullanılan bir bilgisayar grafik uygulaması. Genellikle sinema, televizyon ve reklamlarda aksiyonlu sahnelerde kullanılıyor. Ayrıca kullanılacak olan görüntülerin sabit olmasına da gerek yok. Yani görsel sahneler her türlü dinamik veya statik şekilde de olabilir. Kısaca bahsettiğim bu uygulama oldukça gelişmiş olduğundan çok kaliteli içerikler üretilmesine imkan sağlıyor. Gel gelelim CGI uygulamasını bizim konumuzla kesiştiği yere.
Araştırmalarıma göre geçtiğimiz 10 yıl içinde birçok araştırmacı insan CGI uygulamasını kullanarak robot görseli oluşurmuş ve bilgisayarla anime ederek çeşitli görüntüler açığa çıkarılmış. Aşağıda eklediğim görüntü de bunların en ünlü olanı. Video yayınlandıktan belli bir süre sonra tartışmalar başlamış ve daha sonra CGI olduğunu açığa çıkmıştı. Bu sebepten dolayı Boston Dynamics’in dans eden robotlarına da aynı şüphecilikle yaklaşıldı ve komplo teorileri üretildi. Süreci başından beri titizlikle takip edip araştırma yaptığım için CGI olmadığının kanıtlarını incelediğimde ürkmedim değil.

Boston Dynamics Hakkında
Boston Dynamics dünyanın en iyi teknik üniversitesi olan Boston’daki MIT de doğmuş. Kökeni 1992 ye kadar dayanmasına rağmen araştırmalarıma göre öyle çok da büyük bir yapılanma değil. Mühendisler ve teknik ekipten oluşan 300 kişilik bir ekip bile diyebiliriz. İlgi alanları savunma sanayi. Şöyleki genellikle hayvanlara benzeyen robotlar üretmeleri ile ünlüler. Ürettikleri bu robotlar genelde orduda askerlere yardım etmeleri amacı ile üretilmiş. Bu küçük fakat etkili işler yapan şirketin ürettiği robotların teknik özelliklerini ve işlevlerini de araştırdığım zaman ilginç birtakım bilgilerle karşılaştım.
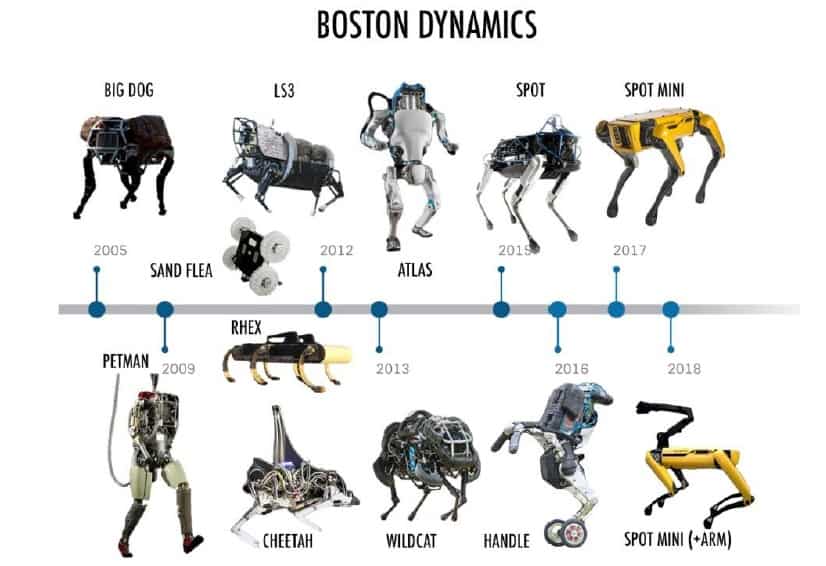
BIGDOG
Sahnelere ilk olarak BIGDOG adı verilen büyük köpek anlamına gelen robot köpek ile çıkmışlar. Orduda askerlerin değişik arazi şartlarında yüklerini taşıyabilmeleri için üretilmiş. İlk bakışta biraz ürkünç görünsede ilk robot yapma girişimine göre teknik açıdan oldukça başarılı bir robot olmuş.

Bu robot köpeğin en öne çıkan özelliği engebeli ve ilerlemesi çok zor koşullara sahip arazilerde kolaylıkla ilerleyebilmesidir. Hatta bu alanlarda koşarak bile yol alabiliyor. Ayak yapısı itibariyle ve sahip olduğu eklemler sayesinde bacakları kolayca bükülebiliyor ve zemin yapısına uygun olarak kendini ayarlayabiliyor.
SAN FLEA
Bigdog’un üstünden geçen tam 4 sene sonra üzerinde çalıştıkları yeni robot San Flea’yı çıkarmışlar. Bu robot gözünüze görünümü açısında oldukça basit gelebilir. Çünkü sadece 4 tekerlek ve bir plakadan oluşuyor. Fakat gerçekleştirdiği işlevsellik açısından çıtanın çok üstünde. Öne çıkan özelliği önündeki engellerin üzerinden atlayabilmesi. Üstelik bu engel sadece taşlar ya da yerde bulunan küçük çaplı engeller değil.10 metre büyüklüğündeki bir binanın bile üstünden atlayabiliyor San Flea.

RHEX
Sand Flea’dan sonraki 3 yıl içinde de boş durmamış çalışmışlar ve 2012 yılında tırtıllardan esinlenerek 6 bacaklı RHEX adlı robotu insanlıkla tanıştırmışlar. Başta da bahsettiğim gibi dikkat ettiyseniz esinlenme noktaları hep hayvanlar. Amaç olarak yine Bigdog ile aynı. Zorlu arazi koşullarında hareket edebilmek ve askerlere yardım sağlamak. Tabiki bigdog’dan daha küçük olduğu için köprü altlarından ve kanallardan geçebilme avantajına da sahip.

ATLAS
RHEX den 1 yıl sonra ile isimlerinin duyulmasını sağlayacak robotlarını piyasaya sürüyorlar. Atlas insansı robot, 1,5 metre uzunluğunda ve 80 kilogram ağırlığında olan Atlas, gelişmiş kontrol sistemi sayesinde karmaşık algoritmaları kullanarak hareketlerini planlayabiliyor, karar verebiliyor ve oldukça çevik hareketler sergileyebiliyor. Bir mekanik sistemin kendi kendine karar vermesini sağlamak ne büyük kazanç. Sanırım bu yüzden olsa gerek dünyanın en dinamik insansı robotu seçilmiş. Ayrıca Atlası üreten mühendisler en çok ağırlıktan yana endişe duymuşlar. Çünkü 80 kg ağırlık küçümsenemeyecek büyüklükte ama buna rağmen Atlas yaklaşık 5 metre yükseğe zıplayabiliyor ve bir saniyede 1.5 metre hareket edebiliyor.

Sanırım bundan daha büyük bir hedef koymuşlar kendilerine fakat bu haliyle bile kendi kulvarında olan insansı robotların çok üstünde. Yalnız videoda dans eden Atlası geliştirip birkaç özellik daha eklemişler. Mesela videoda dans edebilen Atlas hareketlerine yüzde 80 e kadar kendisi karar verebilmiş ve senkron problemi yaşamamış bile. Bu bilgi beni gerçekten çok şaşırttı. Şöyleki kullanılan algoritmaların ve mobil tahmin denetleyicilerinin ne kadar gelişmiş olduğunu anlıyoruz buradan. Ayrıca dünyanın en kompakt (sıkı, yoğun) hidrolik sistemlerine sahip olan Atlas’ın özel motorları ve hidrolik güç ünitesi, 28 hidrolik bağlantı noktasından herhangi birine yüksek güç vererek robotun etkileyici hareketlilik özellikleri göstermesini sağlıyor. Bu da videodaki gibi müthiş ve insansı bir dans ortaya çıkarıyor.
WILDCAT
Atlastan sonra ise yine askerlere orduda yardım edebilecek bir robot çıkarmışlar: Wildcat. Bu robotun en önemli özelliği dünyanın en hızlı gidebilen robotu olması. Saatte 32 km hızla gidebilen bu robot, hız limitinin en üst noktasında olsa bile sorunsuz manevra yapabiliyor ve dengesi kesinlikle bozuluyor. Şuan da hala orduda kullanılmaya devam ediyormuş ve askerlerin işini oldukça kolaylaştırıyormuş.

SPOT
Farkı büyüklükteki köpek robotlardan en küçük ve en son sürüm olanı ise Spot. Spot üzerinde yaklaşık 7 yıl Ar-Ge çalışması yapılmış ve hala da geliştirilmeye devam ediyor.73 kg ağırlığında olan Spot diğer türdeşleri gibi köpeği andırıyor. İçeride ve dışarıda da kullanıma uygun. Bu da demek oluyorki sadece ordu görevleri gibi ağır işlevleri dışında hassas işlevleri de yerine getirebilmesi için güncellenmiş. Hareket sensörleri, kameraları ve hidrolik sistemleri son derece gelişmiş durumda. Ayrıca sağdan veya soldan aldığı güçlü darbelere karşı dengesi kesinlikle bozulmuyor.

Yukarıda da bahsettiğim aşamalar ve detayları göz önünde bulundurursak izlediğimiz eğlenceli videonun geri planındaki tarihsel gelişimi, yapılan Ar-Ge çalışmalarını, gerçekleştirilen zorlu robot mekaniği aşamalarını ve ince işçilikleri ile Boston Dynamics’in ne kadar zorlu bir işi başarmış olduklarını anlamış oluruz. Sürecin başından beri takip eden makine mühendisliği öğrencisi olarak CGI sisteminin kullanılmadığını öğrendiğimden beri araştırmalarıma devam ediyorum ve sizlerle de bir kısmını paylaşmak istedim. Bahsettiğim videoya daha önce denk gelmediyseniz kesinlikle izlemelisiniz diyebilirim. Eğer izlediyseniz de bu paylaştıklarımdan sonra farklı bir gözle izlemenizi tavsiye ederim. Özellikle Atlasın dans figürlerine yüzde 80 e kadar kendisinin karar verdiğini ve Spot’un ayak hareketlerinin insansı hassaslığını göz önünde bulundurmayı unutmayın. Umarım yazım yararlı olmuştur.